Quanyuan Ruan’s o(=•ェ•=)m😼
M.Eng in South China University of Techonology. Focusing on Computer Vision
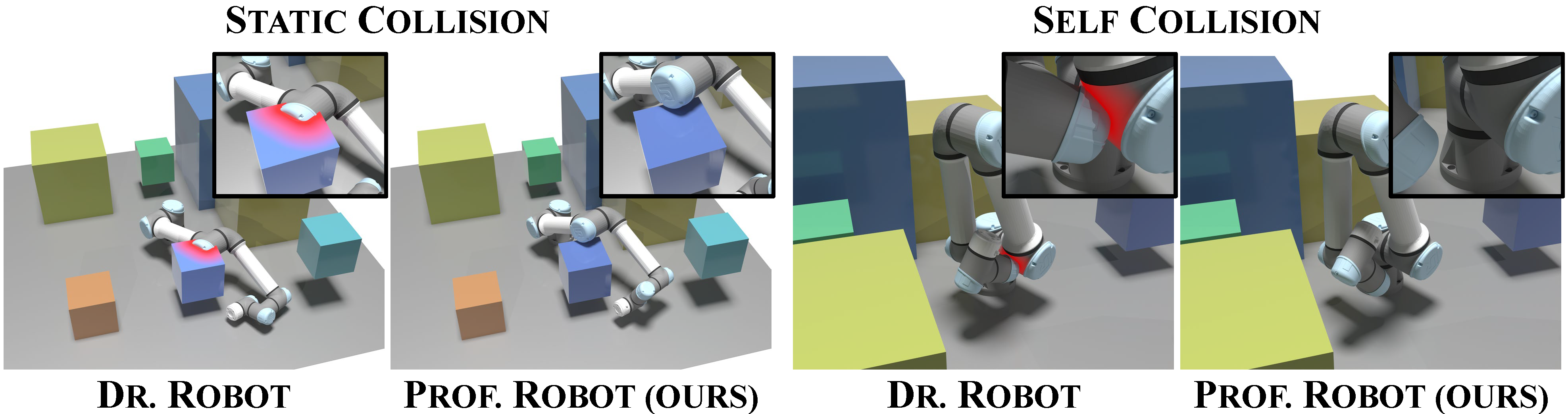
Differentiable rendering has gained significant attention in the field of robotics, with differentiable robot rendering emerging as an effective paradigm for learning robotic actions from image-space supervision. However, the lack of physical world perception in this approach may lead to potential collisions during action optimization. In this work, we introduce a novel improvement on previous efforts by incorporating physical awareness of collisions through the learning of a neural robotic collision classifier....