B.S. & M.Eng., South China University of Technology.
DreamUV: Unwrap Artist-like UV by End-to-End Flow Matching
UV parameterization is a fundamental step in 3D content creation, yet producing production-ready UV layouts remains challenging due to the gap between geometric distortion objectives and the stylistic preferences of professional artists. While classical methods optimize handcrafted energy functions, artist-authored UVs exhibit structural patterns such as straightened seams, axis-aligned islands, and flexible interior deformation, properties that are difficult to explicitly formulate. In this work, we present DreamUV, an end-to-end learning framework that formulates UV unwrapping as a generative Flow Matching problem. Rather than predicting a single optimal parameterization, DreamUV learns a mesh-conditioned transport process that maps noise samples to a distribution of artist-like UV layouts. To reflect real-world authoring practices, we introduce a boundary-aware training strategy that prioritizes seam geometry, and a Model-in-the-Loop Finetuning(MITL) scheme that explicitly accounts for discretization errors during sampling and stabilizes transport dynamics under heterogeneous supervision. We evaluate DreamUV on a large-scale dataset of professionally authored UV layouts. Experiments demonstrate that our method produces significantly straighter boundaries and tighter axis-aligned islands than both classical and learning-based baselines, while maintaining competitive distortion metrics. Qualitative results and a user study with professional artists further confirm that DreamUV generates UV layouts that are not only valid, but aligned with practical production requirements. ...
ARGS: Auto-Regressive Gaussian Splatting via Parallel Progressive Next-Scale Prediction
Auto-regressive frameworks for next-scale prediction of 2D images have demonstrated strong potential for producing diverse and sophisticated content by progressively refining a coarse input. However, extending this paradigm to 3D object generation remains largely unexplored. In this paper, we introduce auto-regressive Gaussian splatting (ARGS), a framework for making next-scale predictions in parallel for generation according to levels of detail. We propose a Gaussian simplification strategy and reverse the simplification to guide next-scale generation. Benefiting from the use of hierarchical trees, the generation process requires only O(log n) steps, where n is the number of points. Furthermore, we propose a tree-based transformer to predict the tree structure auto-regressively, allowing leaf nodes to attend to their internal ancestors to enhance structural consistency. Extensive experiments demonstrate that our approach effectively generates multi-scale Gaussian representations with controllable levels of detail, visual fidelity, and a manageable time consumption budget. ...
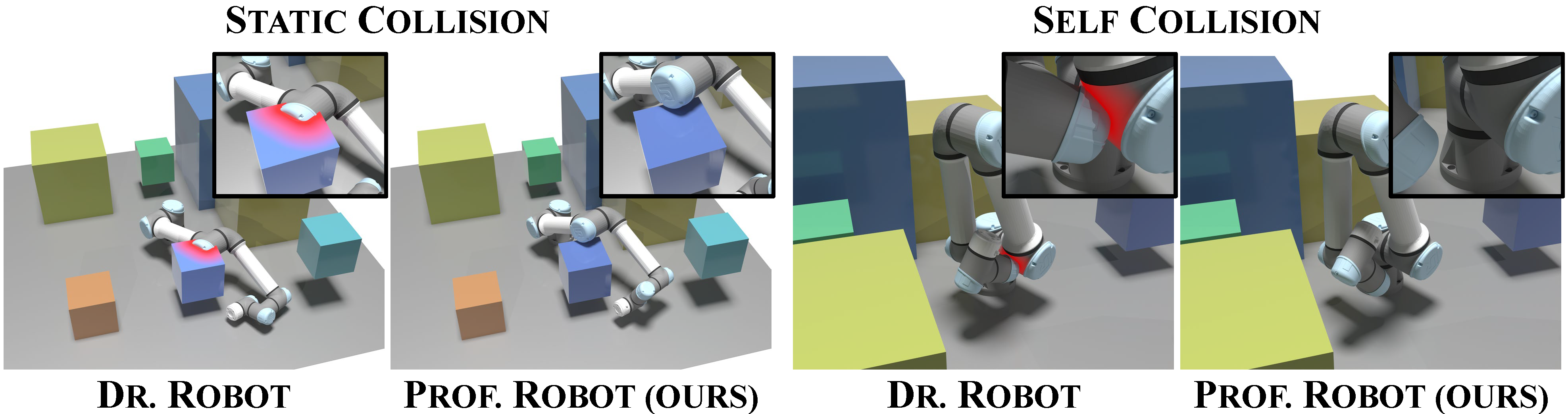
Prof. Robot: Differentiable Robot Rendering Without Static and Self-Collisions
Differentiable rendering has gained significant attention in the field of robotics, with differentiable robot rendering emerging as an effective paradigm for learning robotic actions from image-space supervision. However, the lack of physical world perception in this approach may lead to potential collisions during action optimization. In this work, we introduce a novel improvement on previous efforts by incorporating physical awareness of collisions through the learning of a neural robotic collision classifier. This enables the optimization of actions that avoid collisions with static, non-interactable environments as well as the robot itself. To facilitate effective gradient optimization with the classifier, we identify the underlying issue and propose leveraging Eikonal regularization to ensure consistent gradients for optimization. Our solution can be seamlessly integrated into existing differentiable robot rendering frameworks, utilizing gradients for optimization and providing a foundation for future applications of differentiable rendering in robotics with improved reliability of interactions with the physical world. Both qualitative and quantitative experiments demonstrate the necessity and effectiveness of our method compared to previous solutions. ...